傾斜儀規格術語與資料判讀
原文網址: https://www.geokon.com/Session-01

第一章: 規格與術語
作為岩土(大地)工程師,您可能會問: 什麼是微機電系統 (MEMS) 加速度計? MEMS 加速度計這個術語,許多岩土(大地)工程儀器使用 MEMS 傳感器來測量靜態傾斜,而不是動態加速度。 MEMS 有單軸、雙軸和最近的三軸芯片,根據使用情況,每種芯片都適用。
在查看傾斜測量儀器時,岩土(大地)工程師通常關心一件事,即“讀數的準確性如何”。 準確度經常(並且錯誤地)用於指儀器可以檢測到的最小角度變化。 在研究傾斜傳感器的規格表時,您可能會發現以下術語:
- 準確性
- 精確
- 解析度
- 靈敏度
- 非線性
- 溫度相關不確定度
- 重複性
- 噪音
由於在使用 MEMS 傳感器的岩土(大地)儀器規範方面沒有行業廣泛的標準,因此在比較各種產品的指定性能時,您可能會發現自己不知所措並很快感到困惑。 更複雜的是,傳感器規格(即在受控環境中得出的芯片規格)和系統(即岩土(大地)儀器,包括接口電子設備、轉換算法、機械外殼和外殼)之間通常沒有區別。 我們參考”測量不確定度表達指南” (GUM) 來幫助澄清這些術語。 以下解釋以圖示澄清並幫助顧客了解特定範例來說明 :
準確性 Accuracy
準確度這個術語被廣泛使用,但是準確度通常不是我們關心的。 精度是指儀器測量傾斜角與真實值相比的能力。 例如,當提到一串原位測斜儀時,這與套管形狀的測量有關(即 A 和 B 方向的垂直偏差),在測量運動是關鍵輸出的情況下很少關注這一點範圍。
精確性 Precision
岩土(大地)工程師更關心從原始位置(即移動)的傾斜變化,這與儀器的精度有關。 精度量化了典型傳感器反復產生相同讀數的能力,並應通過置信區間(例如 99% 置信度)進行限定。 精度值越小越好,因為它們代表圍繞傾斜變化的不確定性“雲”。
*更多關於『測量不確定度』的知識,請參考Expression of Uncertainty in Measurements (GUM)
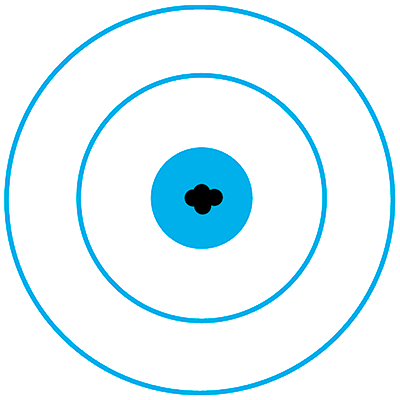
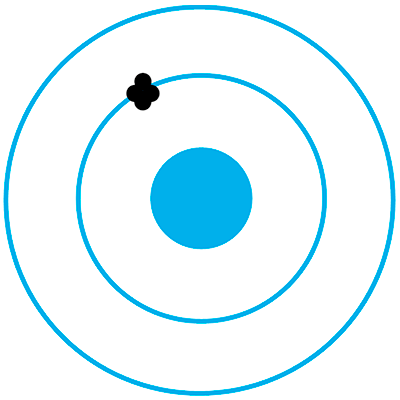
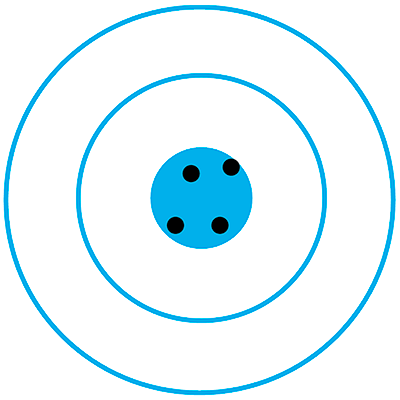
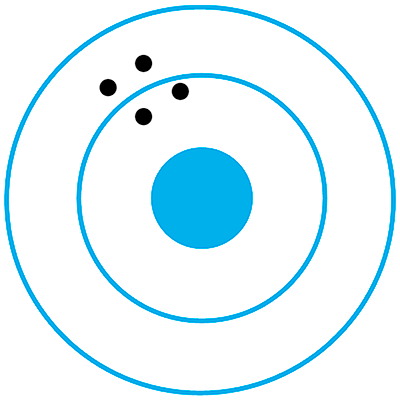
準確性 Accuracy 與精確性 Precision 的差異, 4種情況下的模擬:
- Accurate 並且 Precise
- Accurate, 但不 Precise
- Precise, 但不 Accurate
- 不Accurate,亦不 Precise
*藍色中心點範圍為最精準目標範圍。
解析度 Resolution
解析度描述了傳感器可以測量的最小傾斜變化,但是如果精度較低,那麼具有高解析度的傳感器就沒有什麼價值。 示例:規格說明解析度為 0.01 毫米,但精度為 1.0 毫米。 由於可以檢測到小至 0.01 毫米的變化,該儀器將提供從讀數到讀數變化很大的數據。 這可能會被錯誤地解釋為移動,但是,在傳感器顯示超出 1.0 毫米指定精度的移動之前,我們只是在查看傳感器雜訊(Noise)。
重複性Repeatability
可重複性是單個傳感器在相同條件下一遍又一遍地產生統一數據的能力。
*作為儀器穩定性的指標
穩定性 Stability
這不是 GUM 使用的術語,但它指的是傳感器在指定時間段內的可重複性。
*”重複性”請參照上方解說
靈敏性 Sensitivity
這不是 GUM 使用的術語,但它似乎可以與解析度互換使用。
非線性 Non-Linearity
非線性用於描述在指定範圍內測量的傾斜角與真實傾斜角的失真)。通常用它來代替精度,因為它是限制潛在精度的主要因素(即 MEMS 傳感器的精度隨被測角度而變化)。
溫度相關不確定性 Temperature Dependent Uncertainty
溫度變化對 MEMS 傳感器的傾斜讀數有重大影響。 通過校準技術通常會在一定程度上減少影響,但影響是滯後的,這意味著如果溫度從 10°C 到 20°C 或 30°C 到 20°C,測量的傾斜讀數將不同,儘管溫度相同(20°C)。 由於這種滯後行為,即使使用複雜的校準過程,也存在一些與殘餘溫度相關的不確定性。
第二節 IPI的資料判讀實際情形
(規格如何影響數據)
岩土(大地)儀器供應商通常使用現成的 MEMS 傳感器,並且通常應用一些內部校準和样本平均,以幫助提高各種環境條件下讀數的精度。正如第一節中所討論的,精度是最重要的參數之一,通常以弧秒、度或毫米/米為單位在規範中表示。 可能影響現場精度的條件包括:
溫度(絕對溫度和溫度變化)
- 採樣平均率(某些製造商允許您更改此值以平衡精度和功耗)
- 傾斜度(指定的精度通常基於垂直方向。隨著垂直方向的傾斜度增加,精度可能會降低)
- 機械鬆弛(由於材料蠕變、負載和/或溫度變化導致外殼中機械部件的輕微移動)
- 測量持續時間(精度通常指定為一個持續時間:24 小時、7 天等。MEMS 具有一些時間相關的不確定性,有時被描述為漂移或長期穩定性,這可能需要根據持續時間加以考慮) 項目)。
精度的實際應用是查看一段時間內的一組原位測斜儀 (IPI) 數據,並嘗試確定數據是否顯示實際地面運動,或者輸出運動是否與誤差累積相關 在儀器或系統本身。 這些誤差可能是傳感器(與 MEMS 和其他電子元件相關)或機械誤差(即儀器在外殼中移動,但外殼本身沒有移動)。
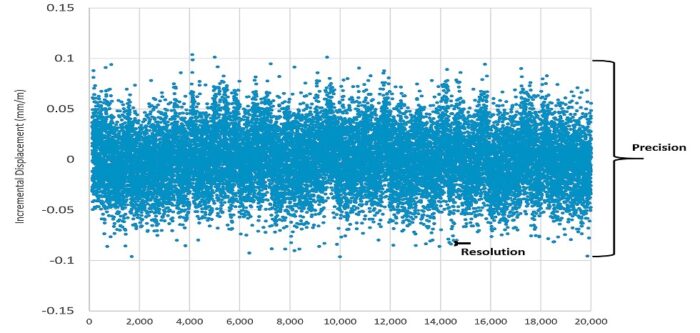
增量位移示例(檢測特定儀器位置的移動):
下圖顯示了來自安裝在地下 20 英尺處的單個 IPI 的現場數據(溫度在此深度穩定)。該圖顯示了在大約 3 個月的跨度內以 5 分鐘為間隔收集的數據。樣本平均在板級完成,輸出代表超過 800 個樣本的平均讀數。傳感器的規定分辨率為 ±0.004 毫米/米,這在所有情況下都可能滿足,但是該參數對於確定是否正在發生真正的運動並不是很有幫助。傳感器規定的精度值在 99% 的置信區間內為 ±0.13 mm/m,該特定儀器滿足此要求(數據通常在 ±0.1 mm/m 範圍內)。在這種情況下,由於數據未顯示正方向或負方向的趨勢,並且所有數據都在傳感器的精度規格範圍內,因此普遍接受的解釋是該 IPI 位置沒有發生移動。
累積位移示例(檢測地表的運動):
現在我們對單個儀器中的傳感器性能有了很好的了解,如何將這些信息外推到一串 IPI 並應用於累積位移數據以解釋地表的運動?估計累積系統誤差的一種方法是根據串中傳感器的數量計算誤差帶。這可以通過取與系統相關的所有誤差的平方和的平方根來實現。例如:一串 10 個 IPI 在鑽孔中連續間隔 10 英尺,總深度為 100 英尺。傳感器規格如下:
解析度Resolution:±0002°
精度Precision:±0050°
非線性度Nonlinearity:±0020°
溫度相關不確定度Temperature Dependent Uncertainty:±0040°/°C
第一個 IPI 的溫度波動為 7°C,第二個 IPI 的溫度波動為 3°C。其餘 8 個 IPI 的深度足以避免表面溫度變化對溫度的影響。與 IPI 1 相關的增量誤差帶可以估計如下:

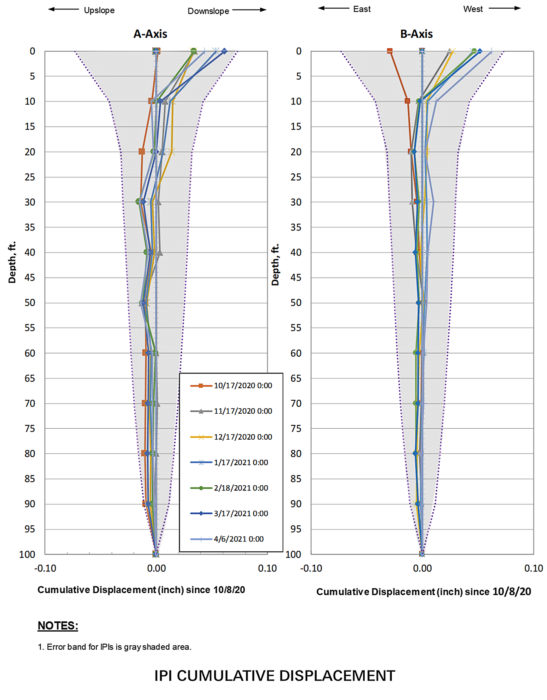
如果沒有誤差帶,人們可能會認為表面移動超過 0.05 英寸,但是通過與 IPI 數據一起繪製的傳感器相關的已知誤差,您可以很容易地看到輸出在系統誤差範圍內,並且移動是 可能與系統的累積誤差有關,特別是頂部儀器看到的溫度相關不確定性。
免責聲明:
本文僅用於提供信息目的,試圖解釋基於 MEMS 的儀器中使用的各種術語,並不旨在用作解釋任何特定地點和/或任何特定係統位移數據的工程判斷。
GEOKON® 版權所有, 禁止任何形式的局部編輯,轉印,製作,除非有GEOKON® 完整的書面授權。